用 Arduino 追踪国际空间站 (ISS Tracker)
Farid Rener About Art CV Food we've cooked Music Writing
用 Arduino 追踪国际空间站 (ISS Tracker)
2025年4月4日
去年夏天,我收到了非常有趣的 HackPack 作为生日礼物。 每两个月,你会收到一盒零件,然后组装一个有趣的硬件项目。
这个包里的第一个物品是红外炮塔 (IR turret)。 你可以用红外遥控器控制炮塔,并且可以向目标发射小型泡沫子弹。

它非常酷,但我不太喜欢射击东西。 大约在同一时间,我看到了这幅 XKCD 漫画:
我喜欢去户外观看有趣的事情,特别是当国际空间站 (ISS) 从头顶经过时。 我也觉得 XKCD 漫画里的设备是个非常有趣的想法。
在与我在 Plateau Astro 的朋友 Trevor 聊天后,我想我可以改造红外炮塔,让它始终指向 ISS。 他向我推荐了 这个 很棒的项目,有人做了类似的事情。
什么是 ISS
简单回顾一下,国际空间站 (International Space Station) 是一个大型的可居住的航天器,它以大约 420 公里的高度绕地球运行。 它以大约 28,000 公里/小时的速度飞行,大约每 90 分钟完成一次轨道。 有宇航员居住在 ISS 上,他们进行很酷的实验,并且可以做一些事情,例如将自己绑在墙上,以免在睡觉时漂走。
对我来说,ISS 最棒的部分是你可以从地球上看到它! 在晚上,当它从头顶经过时,它看起来像一颗移动非常快的星星,或者是一架非常非常远的飞机。 你可以下载一个像 ISS Detector 这样的应用程序,它会提醒你任何可见的经过。 一旦你习惯了出去看 ISS,你也可以开始做一些愚蠢的事情,比如用它来反射无线电信号,或者 与在船上的宇航员交谈。
构建 ISS 追踪器
为了激励你,这里是 ISS 直接经过我家时的最终产品: 你的浏览器不支持 video 标签。
指向 ISS
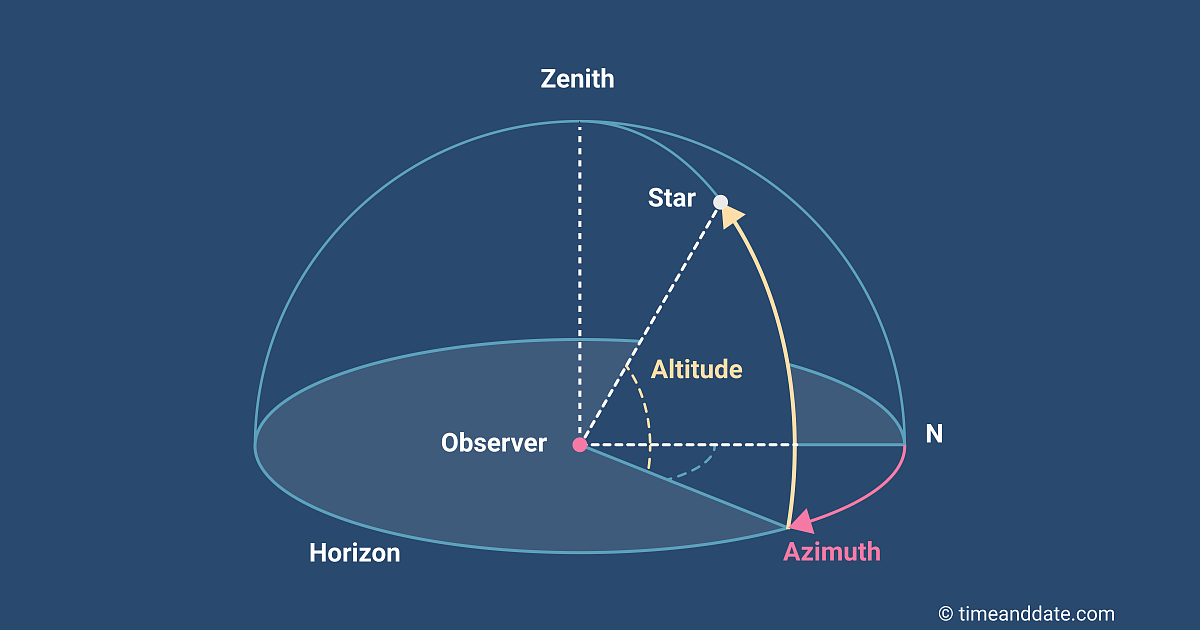
我们的目标是指向 ISS 的箭头(无需看手机),这样我们就能知道它何时在地平线上方,从而可以看到它。 考虑到红外炮塔的设计,我们需要两个角度:方位角 (azimuth) 和 仰角 (elevation)(或高度)。
我们需要一些信息才能做到这一点:
- ISS 的位置,无论是 现在 还是过去某个已知时间
- 我们当前的位置和海拔
- 我们需要将这两个信息放在相同的坐标系中
查找 ISS 的位置
NORAD 跟踪地球轨道上卫星的位置,并生成所谓的 双行轨道根数 (Two-Line Element set),或 TLE。 TLE 是一种标准化的数据格式,用于描述对象的轨道参数,并且我们可以从该数据计算对象在某个时间点的位置。 对于像 ISS 这样的太空物体,TLE 每天更新几次。
CelesTrak 发布这些 TLE,并通过他们的 API 以如下格式向公众开放:
ISS (ZARYA)
1 25544U 98067A 25093.13425953 .00020483 00000+0 37635-3 0 9994
2 25544 51.6367 318.7328 0004848 3.8316 356.2709 15.49192057503527
由于 ISS 的轨道速度比 TLE 的更新速度快得多,我们需要根据 TLE 中的参数计算其当前位置。 为此,我们使用 SGP4 算法 根据 TLE 中给出的初始条件来传播 ISS 的轨道元素。 该算法考虑了很多因素,例如地球的非球形引力场、大气阻力以及月球和太阳的引力。
通过 SGP4 算法传递 TLE 中的初始条件,我们最终得到一个基于 地心惯性坐标系 (Earth-Centered Inertial) (ECI) 的位置,ECI 是一个平面,相对于我们计算时的恒星固定(“历元”)。
我们现在需要将我们当前的位置转换为相同的参考系 (ECI),这样我们就可以绘制从我们当前位置到 ISS 当前位置的向量。 这个向量将为我们提供角度 - 方位角和仰角,我们需要指向我们的箭头。
Direction calculateAzEl(double lat, double lon, double alt, double satX,
double satY, double satZ, libsgp4::DateTime now)
{
// Convert lat/lon to radians
const double phi{lat * pi / 180.0};
const double lambda{lon * pi / 180.0};
const double h{alt};
const double sin_phi{sin(phi)};
const double N{a / sqrt(1 - e2 * sin_phi * sin_phi)};
// Compute ECEF coordinates of the observer
const double Xo_ecef{(N + h) * cos(phi) * cos(lambda)};
const double Yo_ecef{(N + h) * cos(phi) * sin(lambda)};
const double Zo_ecef{(N * (1 - e2) + h) * sin(phi)};
const double theta{now.ToGreenwichSiderealTime()};
// Rotate ECEF coordinates to ECI coordinates
const double observerX{Xo_ecef * cos(theta) - Yo_ecef * sin(theta)};
const double observerY{Xo_ecef * sin(theta) + Yo_ecef * cos(theta)};
const double observerZ{Zo_ecef};
// Compute the vector from observer to satellite in ECI
const double dX{satX - observerX};
const double dY{satY - observerY};
const double dZ{satZ - observerZ};
// Compute local unit vectors (East, North, Up)
// Up vector (U)
const double norm_O{sqrt(observerX * observerX + observerY * observerY + observerZ * observerZ)};
const double Ux{observerX / norm_O};
const double Uy{observerY / norm_O};
const double Uz{observerZ / norm_O};
// East vector (E)
const double norm_E{sqrt((-Uy) * (-Uy) + (Ux) * (Ux) + 0.0)};
const double Ex{-Uy / norm_E};
const double Ey{Ux / norm_E};
const double Ez{0.0};
// North vector (N) = U x E
const double Nx{Uy * Ez - Uz * Ey};
const double Ny{Uz * Ex - Ux * Ez};
const double Nz{Ux * Ey - Uy * Ex};
// Project the satellite vector onto the ENU coordinates
const double norm_d{sqrt(dX * dX + dY * dY + dZ * dZ)};
const double dX_unit{dX / norm_d};
const double dY_unit{dY / norm_d};
const double dZ_unit{dZ / norm_d};
// Compute ENU components
const double E_comp{Ex * dX_unit + Ey * dY_unit + Ez * dZ_unit};
const double N_comp{Nx * dX_unit + Ny * dY_unit + Nz * dZ_unit};
const double U_comp{Ux * dX_unit + Uy * dY_unit + Uz * dZ_unit};
// Calculate Azimuth and Elevation
double azimuth{atan2(E_comp, N_comp) * 180.0 / pi};
if (azimuth < 0.0)
{
azimuth += 360.0;
}
const double elevation{asin(U_comp) * 180.0 / pi};
return Direction{azimuth, elevation};
}
我们最终得到两个角度:
- 方位角 (Azimuth):这是从北方开始的角度,以度为单位。
- 仰角 (Elevation):这是从地平线开始的角度,以度为单位。
构建追踪器:
材料
- Arduino Uno R4 Wifi
- 28BYJ-48 步进电机 + 电机驱动模块(用于 方位角 (azimuth) 旋转)
- SG90 微型舵机(用于 仰角 (elevation) 旋转)
- 一个 5V 电源。 我使用了 HackPack 红外炮塔附带的电池组。 如果是电池,则有助于电缆管理(稍后会详细介绍)。
- 各种电线。
- 黏土,用于将所有东西组装在一起……
像这样组装电路:
![]()
步进电机连接到引脚 8-11,舵机连接到引脚 12。我还连接了一个开关,但这是可选的。
身体
最初的红外炮塔不太符合我的需求,因为我希望仰角“箭头”能够旋转完整的 360 度。 我也从未在 3D 中设计过任何东西,并且想学习! 当我在 Recurse Center 时,有很多好心人帮助我完成了这个过程。
该主体是在 OnShape 中设计的(文档, STL of body, STL of arrow, STL of motor horn)
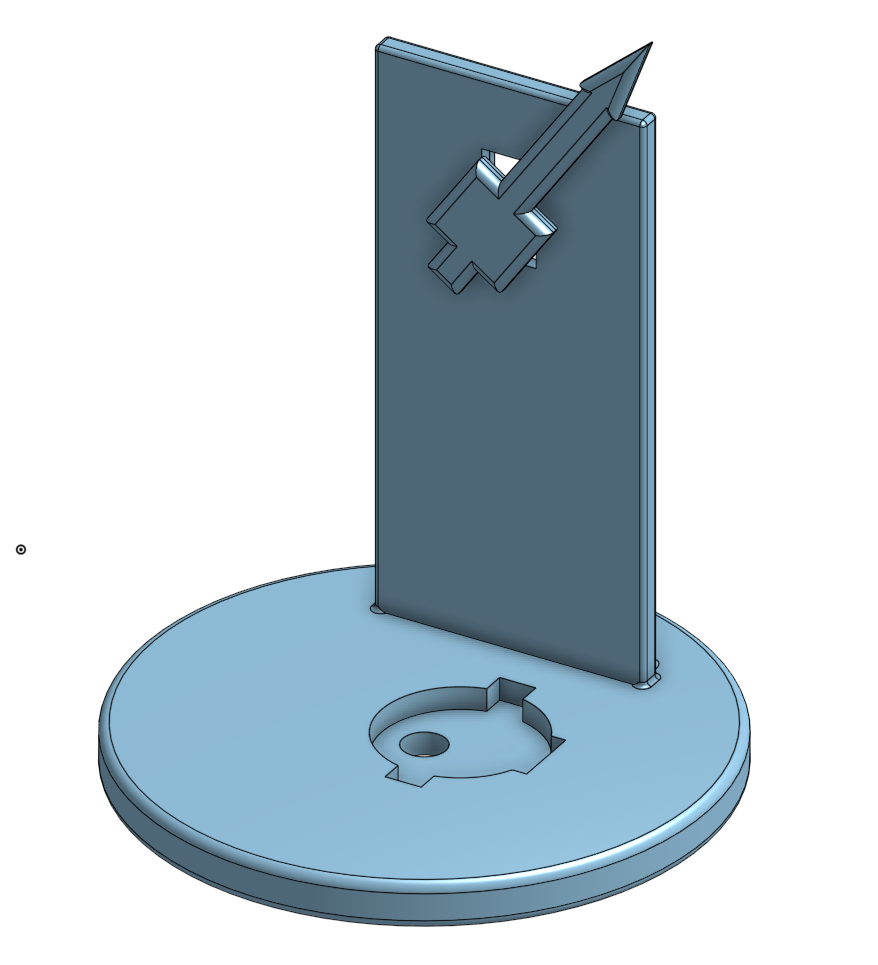
这是一个有趣的设计过程。 我必须进行非常精确的测量,例如:
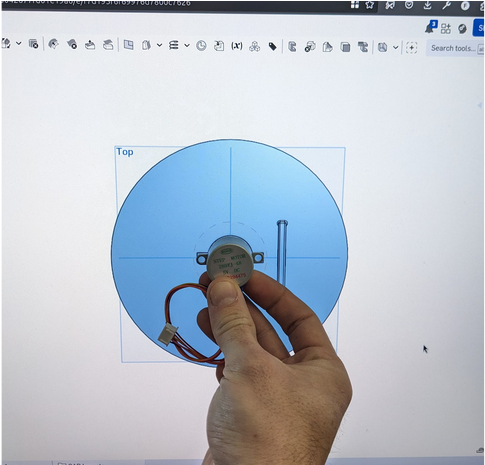
如果你打印上面链接的所有 STL 文件,那么所有部件如何组合在一起应该是不言自明的。 唯一幸存下来的红外炮塔部件是“腿”。 你可以尝试将“电机喇叭”拧到一块木头或其他坚固的东西上,效果应该一样。
我用黏土以某种随意的方式将所有电子元件粘在背面。 如果有 V2 版本,我将为这些东西留出更多空间。
组装
 步进电机喇叭连接到基座。 显然,使用铅笔芯作为润滑剂在 3D 打印塑料上效果很好! 或者你可以简单地将喇叭拧到一块木头或其他稳定的基座上
步进电机喇叭连接到基座。 显然,使用铅笔芯作为润滑剂在 3D 打印塑料上效果很好! 或者你可以简单地将喇叭拧到一块木头或其他稳定的基座上
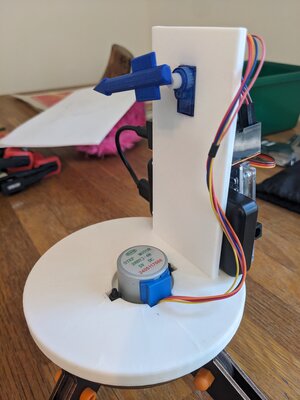 前视图。 打开追踪器时,步进电机的顶部应指向北方
前视图。 打开追踪器时,步进电机的顶部应指向北方
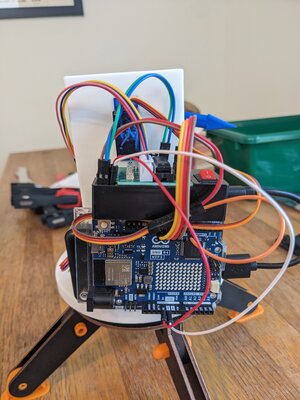 后视图。 电子元件用黏土连接
后视图。 电子元件用黏土连接
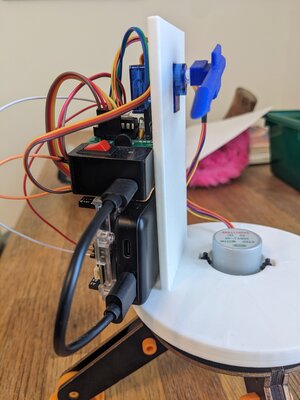 电池和开关的侧视图
电池和开关的侧视图
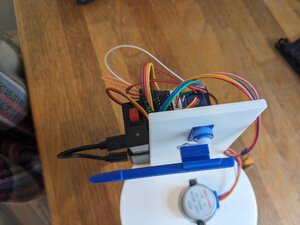 连接到舵机的指针的俯视图
连接到舵机的指针的俯视图
代码
代码库 编写起来非常有趣,而且我必须学习很多轨道力学才能让它做我想做的事情。
要使其运行:
- 首先断开电池与 Arduino 的连接
- 从 GitHub 下载 Arduino IDE v2.3.3。 较新的版本会创建更大的二进制文件,这些文件大于 R4 上可用的程序内存。
- 创建一个新的 arduino_secrets.h 版本,并使用你的 WiFi 信息和当前位置填充它。
cp ./arduino_secrets.h.example ./arduino_secrets.h
- 将其刷新到 Arduino 上。
- 默认情况下,
src/Config.h中的 Debug 标志已设置,这意味着它会将调试信息打印到 Serial 控制台。 如果一切顺利,你将看到它打印出:- Wifi 状态
- 当前的 TLE
- 然后每秒钟它都会打印出它认为 ISS 当前所处的方位角和仰角。 你可以使用 ISS Detector 应用程序验证其准确性
- 一旦所有这些都运行正确,你就可以断开 USB 电缆并连接电池。
- 在打开它之前,你应该将追踪器设置成步进电机的顶部指向北方。
- 打开它。 几秒钟后,它应该连接到你的 wifi 网络,并移动电机以指向 ISS。
- 现在它每秒钟都会更新其位置。 当 ISS 离你最近时,它最令人印象深刻,因为相对角度大得多。
- 如果你愿意,你可以通过更改 这一行 代码为你想跟踪的 NORAD 目录编号来跟踪其他卫星。
constexpr const char CATALOG_NUMBER[] = "25544";
注意
- 我使用了 这里 的 SGP4 C++ 库。
- 在尝试在 Arduino 上运行它时遇到的一个问题是,在编写它时,代码库太大而无法适应! 这是我第一次不得不考虑编译后的二进制文件的大小 - 最令人沮丧的部分是弄清楚使用 C++
stringstream会向我的二进制文件中添加过多的代码。 - 如果你最终构建了其中一个,请联系我!
Farid Rener
- Farid Rener
- faridrener at gmail dot com
- proteusvacuum
Farid 的笔记集合